Contactez-nous
Contactez-nous

Pour préserver le trafic, de nombreuses opérations de maintenance nécessitant d’intervenir directement sur les réseaux ferrés peuvent avoir lieu de nuit ; mais cela représente une contrainte de visibilité et un temps d’intervention limité.
Pour en optimiser l’efficacité, il paraissait pertinent de développer un système permettant aux mainteneurs de maintenir un niveau de sécurité du matériel lors des mouvements des engins de chantier.
En effet, comme en voiture, nous n’avons qu’une vision partielle de tous les éléments qui nous entourent à cause des angles morts.
Durant mon stage, j’ai donc contribué au projet d’intégrer l’intelligence artificielle directement dans des systèmes embarqués avec l’appui de mon tuteur Quentin LEMESLE, et du Responsable Programme Datascience d’Altametris : Anis CHAARANA.
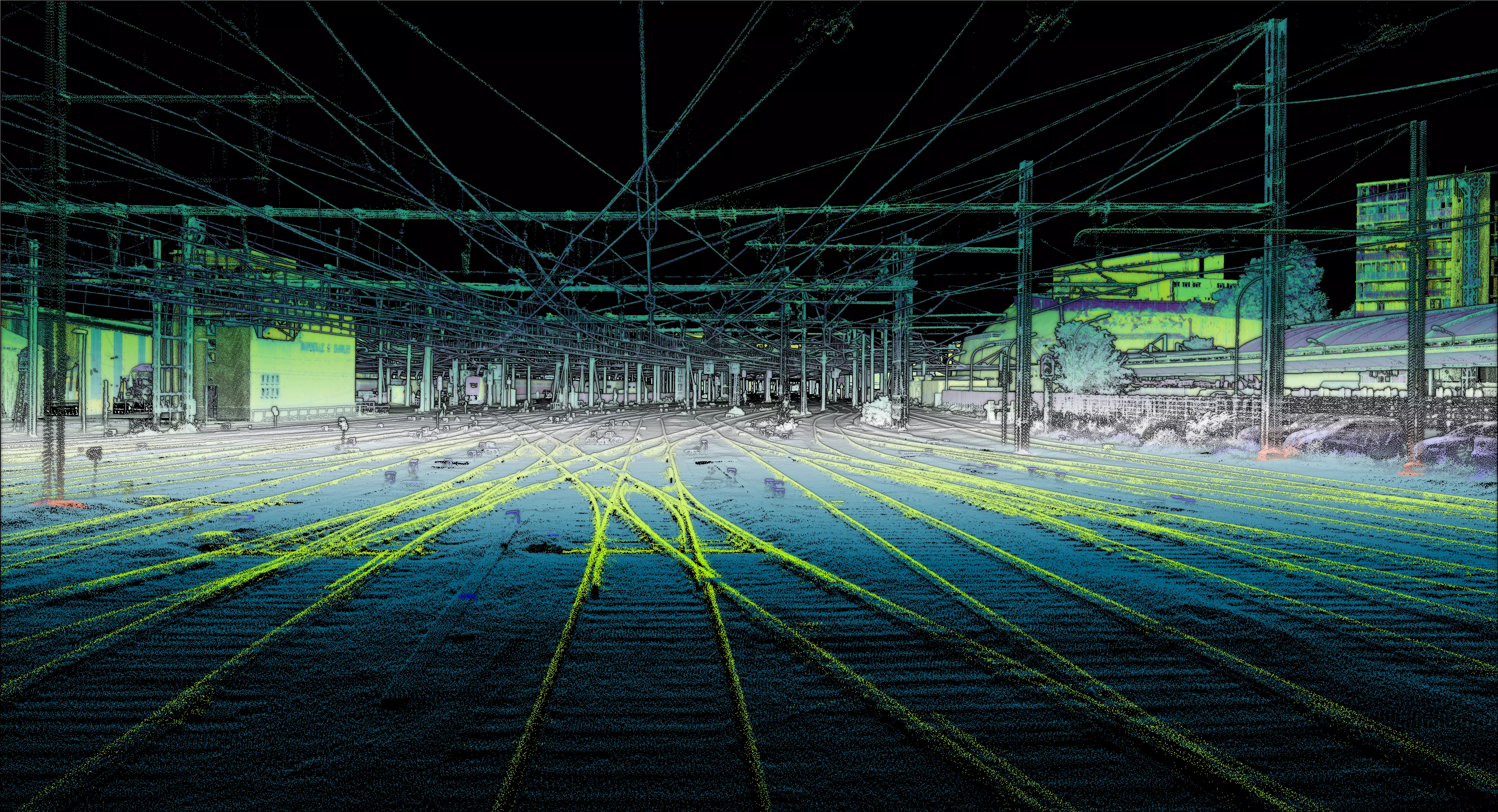
L’un des systèmes sur lesquels j’ai pu travailler a été conçu pour être placé dans la cabine du conducteur pour qu’il puisse détecter directement les obstacles sur les voies grâce à la combinaison entre une caméra, un ordinateur embarqué et un algorithme d’intelligence artificielle (IA). Concrètement c’est un système complexe d’avertissement et de captation d’images.
1. Prototypage du système : un cahier des charges précis pour répondre efficacement aux standards ferroviaires
Comme pour tout projet de prototypage, la première étape pour développer le système embarqué est la conception du cahier des charges ; une étape qui correspond aux 6 premières semaines de mon stage.
A. Un système aux composants dimensionnés pour son usage
Il était donc nécessaire que le système intègre :
- Un ordinateur de bord puissant mais économe
- Une caméra avec une bonne vision de jour comme de nuit
- Un petit écran d’information
En plus des composants, le système devait être léger et fin pour être placé dans la majorité des endroits, incluant les parebrises des engins de chantier.
B. Un ordinateur de bord dédié au projet
Associé aux équipements, la puissance de l’outil réside dans sa capacité à réaliser des calculs en temps-réel avec l’ordinateur.
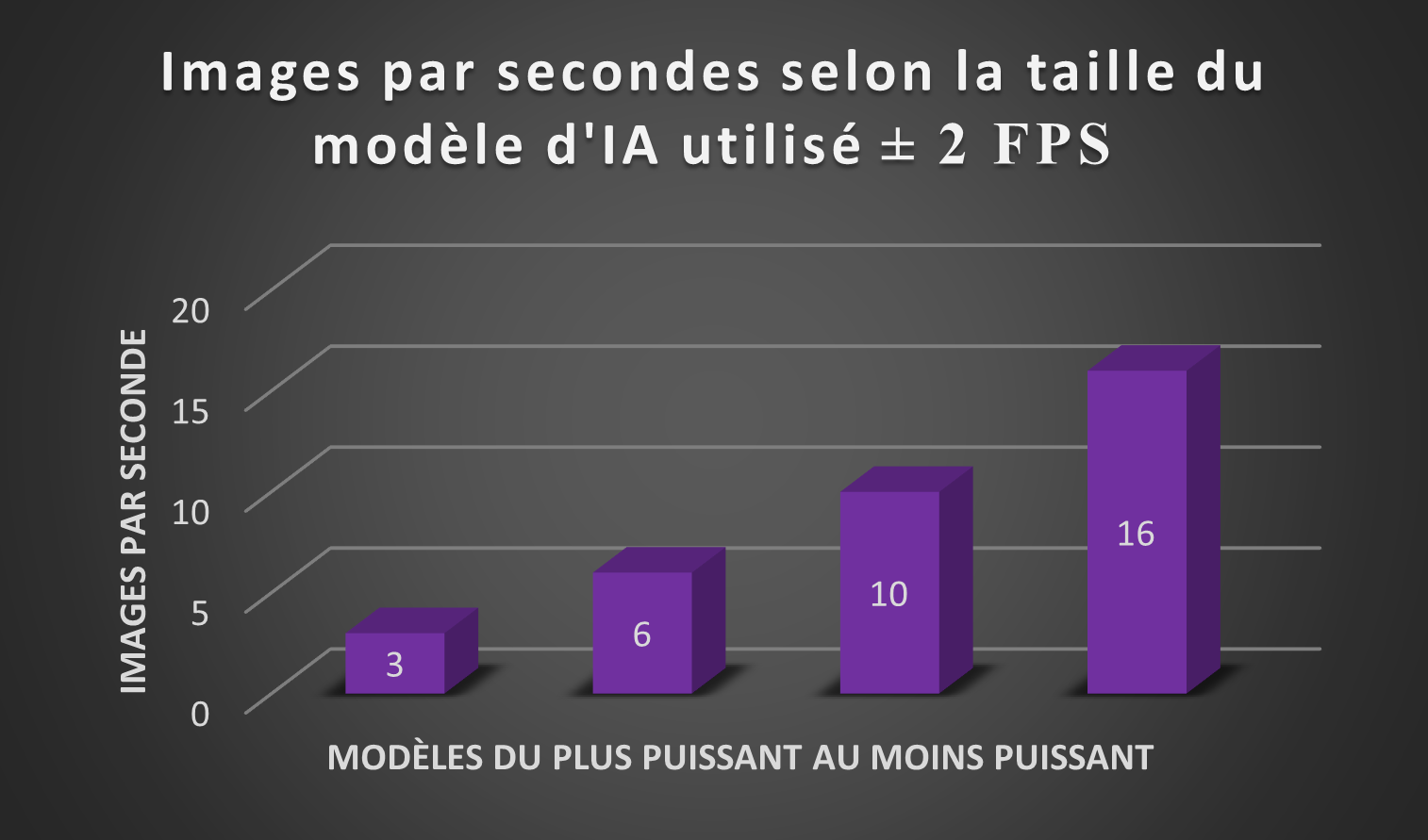
Nous avons donc comparé différentes solutions chez l’un des plus grands constructeurs de processeurs de traitement d’images car ils offrent des solutions puissantes et économes. Nous avons testé deux versions, plus ou moins puissantes et avons finalement choisi l’ordinateur permettant un traitement de 6 images par secondes.
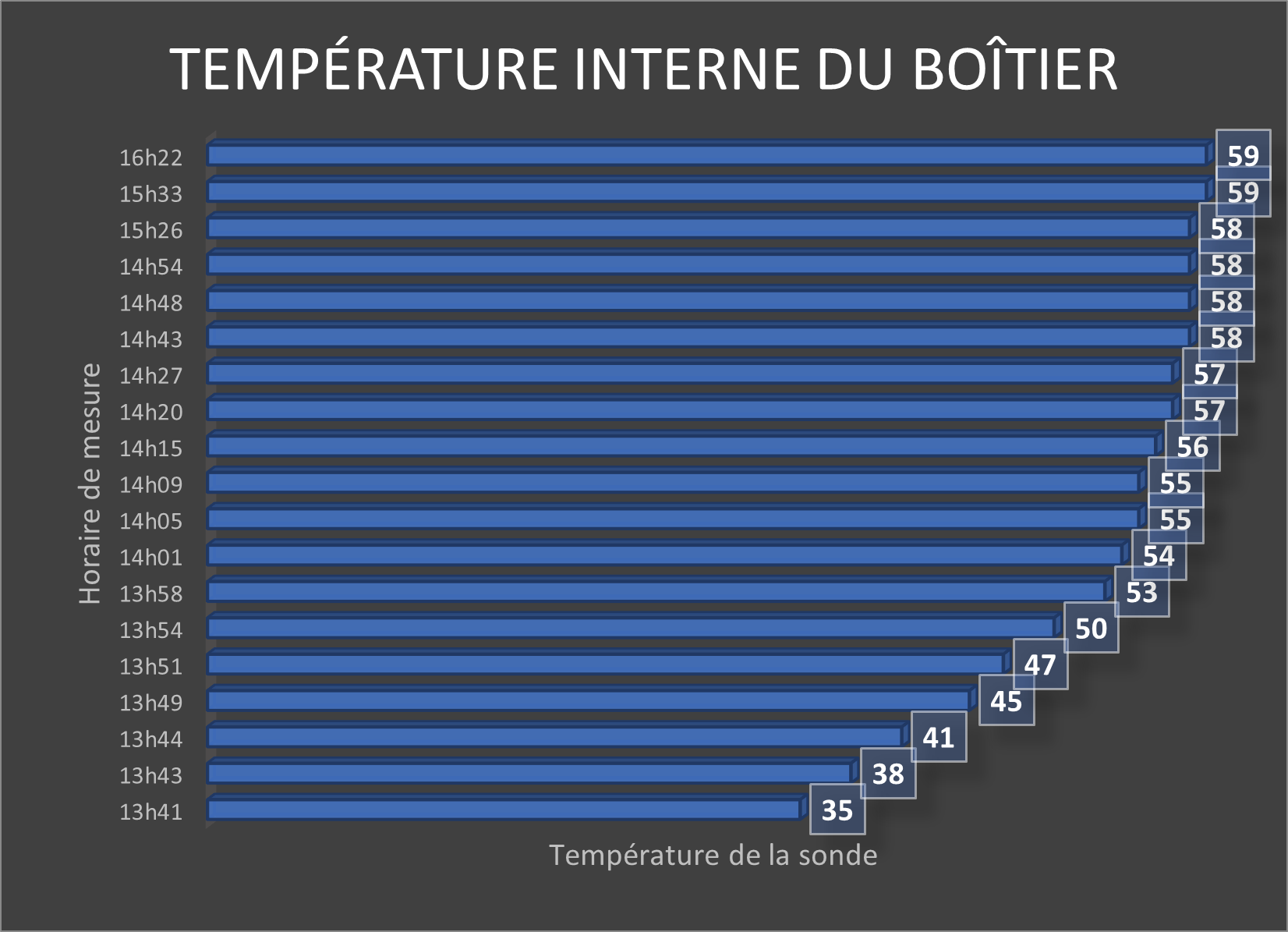
Nous avons aussi testé la capacité de l’outil à fonctionner dans un environnement clos avec une température extérieure de 30°C pour simuler des conditions réelles d’opération en été en regardant la température de deux composants, le processeur de calcul (CPU) et le processeur graphique (GPU).
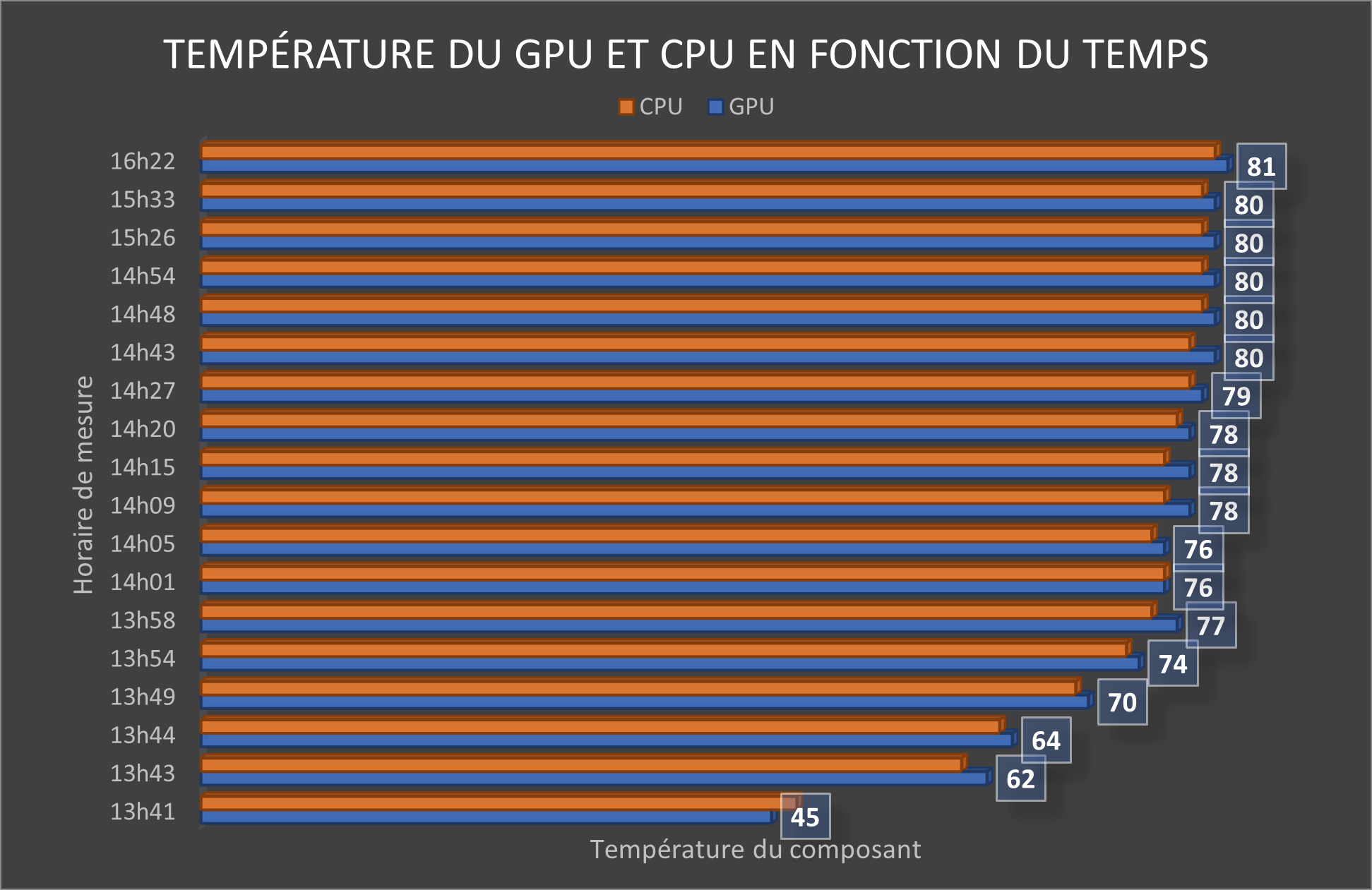
Les températures affichées sont élevées mais restent correctes car elles n’atteignent pas le cap de température maximale et que la performance du système n’est pas altérée.
Le test a été limité à moins de 3h car nous avons noté des valeurs de pallier sans variation durant la dernière heure. La valeur de température à l’intérieur du boîtier était, elle aussi satisfaisante : avec une valeur de pallier atteinte durant le test. Comme vous pourrez le constater sur le graphique ci-après, cette valeur suit celle des composants :
Enfin, dans un contexte de crise énergétique, il était indispensable de prendre en considération et de tester la consommation électrique de notre système. Nous obtenons une consommation de 28,65 Watts qui reste raisonnable comparée à un ordinateur portable pouvant aller de 60 à 240 Watts.
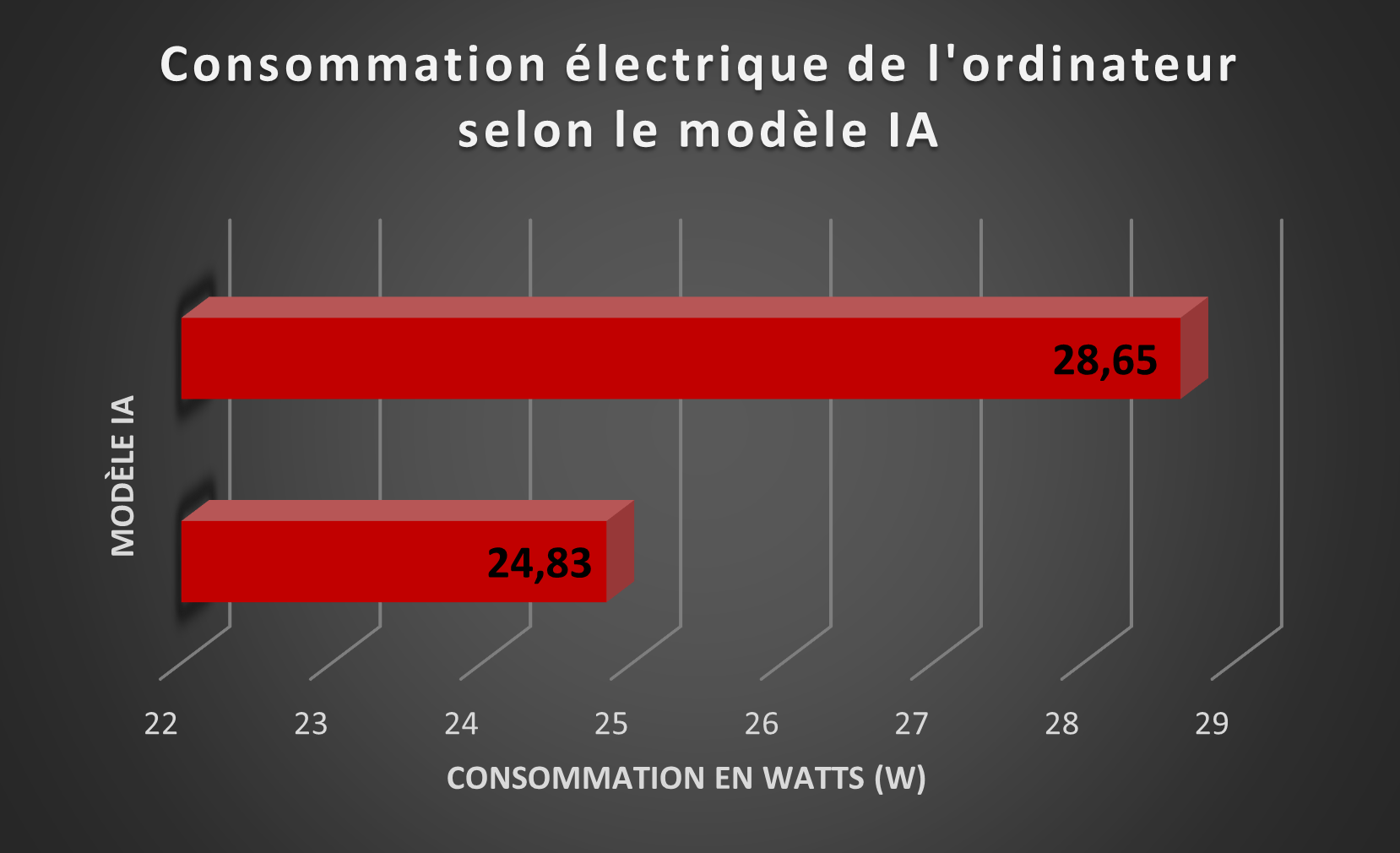
Nous adapterons donc notre batterie en fonction afin d’assurer le meilleur compromis entre autonomie et portabilité du système final.
C. Une caméra nyctalope
Pour répondre à la problématique initiale du manque de visibilité de nuit, il était indispensable de porter une attention particulière au choix des capteurs visuels. Nous devions donc embarquer une caméra haute résolution permettant d’avoir un retour d’image net surtout en mouvement ainsi que dans des conditions de très faible luminosité.
En effet, comme pour les appareils photos, plus le pixel est gros, plus il absorbe de lumière.
Pour être efficace de nuit, il était donc nécessaire de démultiplier la taille des pixels.
Nous avons envisagé une technologie opposée au dernier smartphone de Samsung, le Galaxy S23 Ultra et son capteur de 200 Mégapixels.
Si ses pixels mesurent 0,64 µm, une taille qui semble infime, et c’est le cas, sa configuration informatique, active en fait une réduction de la résolution pour obtenir une image avec des plus gros pixels, comme ceci :
![]()
Compte tenu de notre besoin, nous nous sommes tournés vers une caméra avec un capteur encore de plus grande taille mais avec une résolution plus petite. Avec des pixels très larges nous allions pouvoir obtenir un maximum de lumière.
Enfin, pour garantir une image nette en mouvement, nous avons sélectionné une technologie de capteur différente des modèles les plus classiques.
Finalement, la caméra aura un capteur capable de prendre en photo l’information de tous les pixels d’un coup. En fait cette méthode se distingue de celle de nos capteurs traditionnels qui capturent l’image ligne par ligne.
![]()
Comme illustré ci-dessus, à gauche, le capteur traditionnel fonctionne de la façon suivante : il enregistre des lignes de pixels à la suite, entrainant un léger délai et donc une déformation de l’image lors du mouvement des objets.
À droite le capteur pour le système. La différence est flagrante et démontre les raisons de notre choix vers cette technologie.
Les images obtenues par les utilisateurs finaux seront donc sans déformations et permettront de donner de meilleurs résultats grâce à l’Intelligence Artificielle (IA).
2. Un prototype de détection automatique viable et testé en conditions réelles
Une fois développé, nous avons entamé une période de tests pour adapter le prototype aux besoins et contraintes exprimés au fil de l’eau par nos clients.
Les premiers prototypes étaient assez gros et lourds (illustration ci-après).
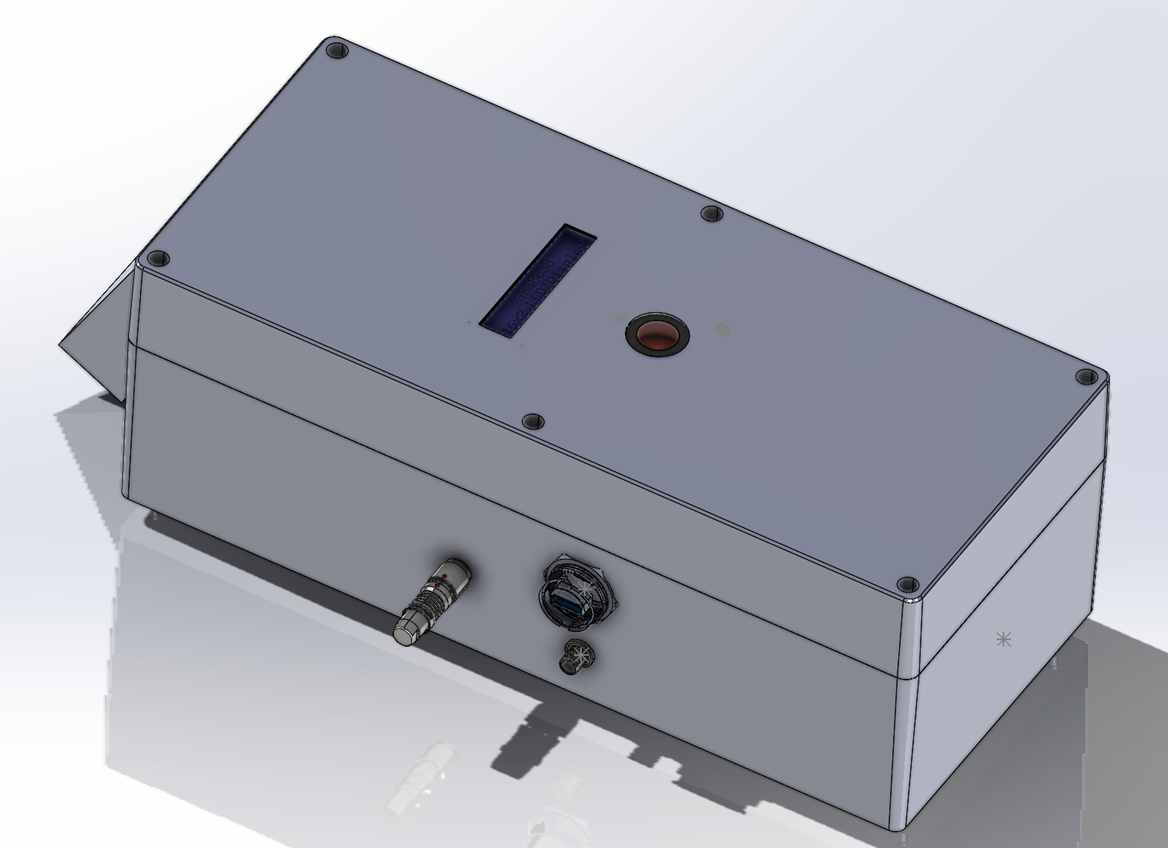
Visuel non contractuel du prototype du système embarqué
Ils étaient notamment pensés pour être flexibles et modulables pour intégrer des composants répondants à différents usages. Comme par exemple l’aide au refoulement des trains. Finalement, le poids et l’encombrement sur la vitre des engins de chantier devant être limités, nous avons réduit sa taille, développé sa modularité et son système de fixation comme illustré ci-après :
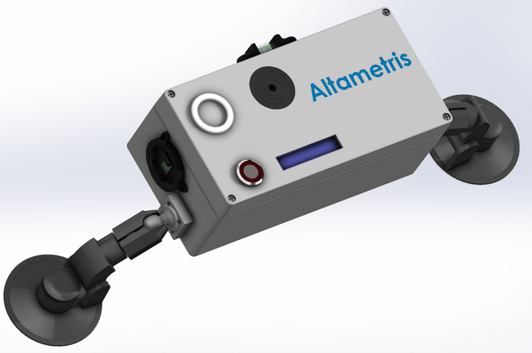
Visuel non contractuel du prototype du système embarqué
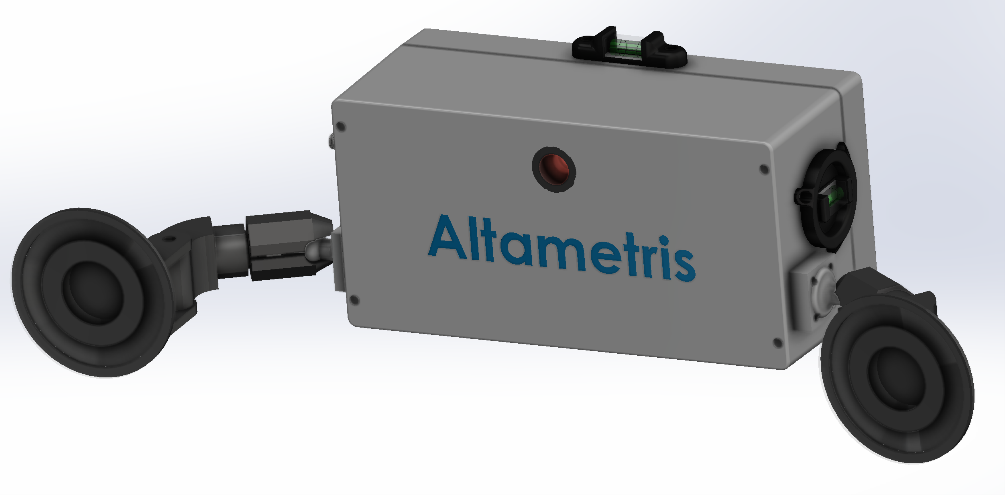
Visuel non contractuel du prototype du système embarqué
Au terme de mes cinq mois de stage, l’hypothèse de départ s’est vérifiée : notre système embarqué qui combine capteurs à haute résolution et Intelligence Artificielle permet d’aider à sécuriser les opérations de maintenance de nuit. Cela grâce à un signal sonore et lumineux matérialisant la détection d’obstacles dangereux.
À date, le système est en phase de développement Il est probable que plusieurs itérations du prototype seront nécessaires avant d’être parfaitement opérationnel. Mais les fondamentaux ont largement passé l’épreuve de l’expérimentation et permettent déjà de répondre au besoin exprimé par le client en l’état.
D’ici l’été, je pense qu’il sera déjà possible de constater de nouvelles avancées en termes de fonctionnalités.
Je souhaite remercier toute l’équipe d’Altametris qui a su m’intégrer, me partager son savoir, mais aussi me permettre d’avoir des moments d’échange hors du cadre du travail et d’appre3ndre le fonctionnement d’une société humaine. Je remercie en particulier toutes les personnes m’ayant permis de réaliser ce stage ici ainsi que ceux m’ayant aidé pour la réalisation de ce projet. En particulier, je remercierai Quentin Lemesle, pour m’avoir permis de travailler sur ce sujet, avec des conseils et une aide pour apprendre davantage tout en me partageant sa passion.
Altametris ne valorise pas que les données également les compétences de chacun.